![<?echo $_SERVER['SERVER_NAME'];?>](/template/twentyseventeen/skin/images/header.jpg)
People who love to watch small videos such as "Vibrot" find that the net reds are walking while they are walking, the picture is not shaking, swaying, and the effect is different when taking a selfie. Why? It turns out that a tool is needed here--handheld gimbal! The handheld pan/tilt will sense the state of motion, and the device will remain stable by running the motor, and the picture taken will not shake.
The core algorithm of the handheld PTZ is to use the FOC motor solution to achieve fine adjustment of the three dimensions of the gimbal. For three-way BLDC, the MCU monitors the position and status information of the motor and the safe operation of the motor in real time through the position loop, speed loop and current loop. In order to ensure that the body is moving, during the external jitter process, the equipment remains level within a very low error range. Therefore, the control framework of the handheld PTZ:
Motion control: 1-3 MCUs with FPU and floating-point arithmetic unit for processing FOC algorithm, X, Y, Z three dimensions each stepper motor, each stepper motor needs 1 piece three Phase half bridge driver chip, or H bridge composed of 6 MOSFETs, control motor speed and commutation.
Feedback mechanism: When detecting the position of the motor, the Hall element or the magnetic encoder is generally required to realize the motor position detection, so that the motor state can be adjusted in real time. In order to ensure the normal operation of each stepper motor, it is necessary to use the op amp to collect the current of the motor drive chip to ensure the normal operation of the motor, or to stagnate to prevent damage to the machine after the fault.
Human-computer interaction control: At present, there are roughly three types of line control, line control, BLE, WIFI. Because the terminal is equipped with BLE, the cloud-based human-computer interaction control adopts most BLE schemes, but the BLE data bandwidth is low, which is not suitable for high-definition data speed. transmission. Therefore, some manufacturers use WIFI to achieve high-speed transmission of video streams.
Power supply system: PTZ power supply system: generally for lithium battery power supply, 24V boosted all the way, to provide voltage for the motor drive chip or MOSFET, to ensure the motor operation, all the way to 3.3V or 5V to supply power to the MCU.
Not much to say, the picture is more intuitive:
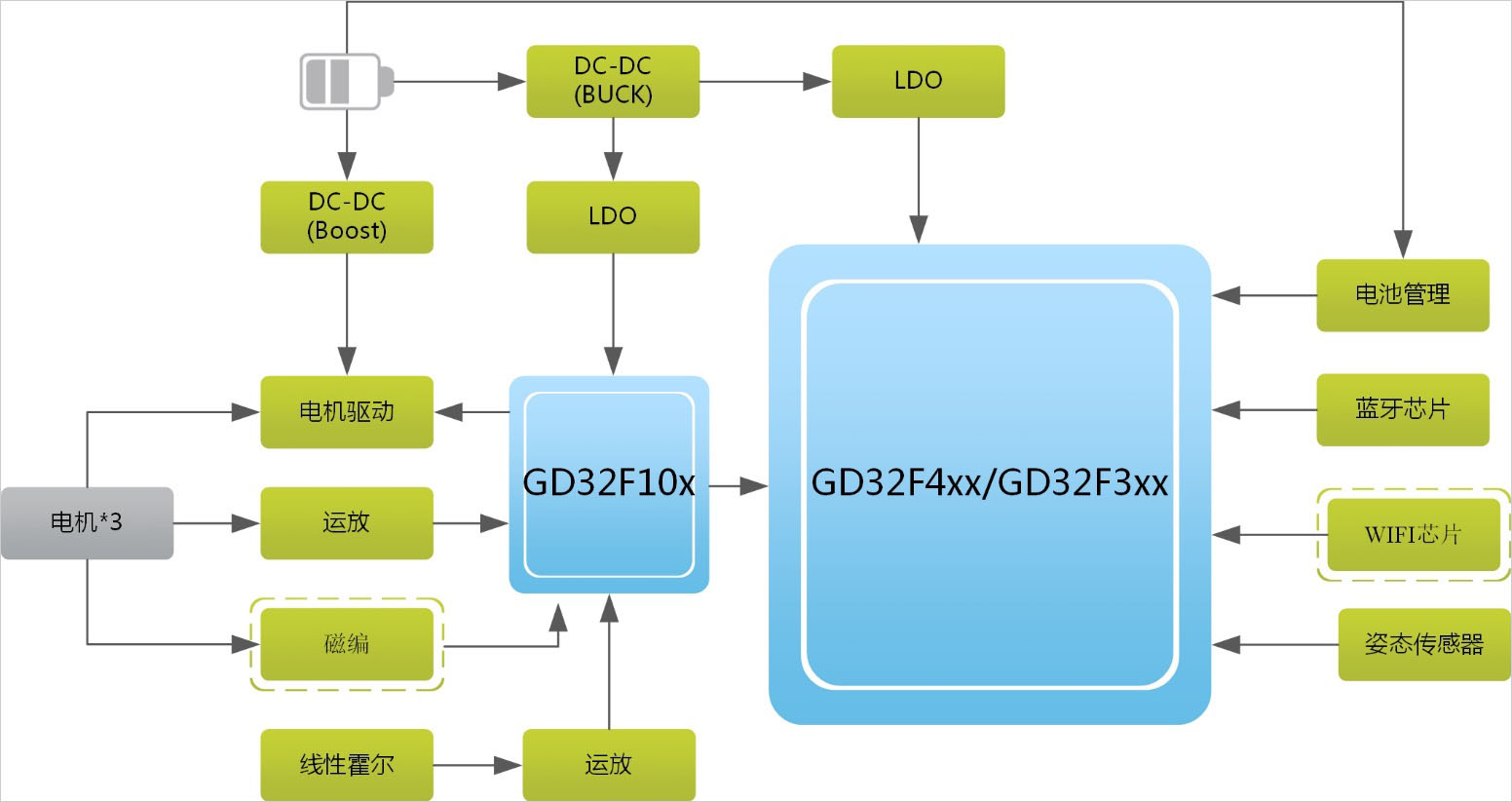
1. Main control unit:
Mainly completed three things:
(1) Motor control. Reading the attitude sensor signal to determine the current attitude of the gimbal, that is, sampling the stator current and current, successively passing Clark, Park operation, PI calculation to calculate the parameters to be adjusted, after Clark, Park inverse operation, the conversion output is the excitation current, and then with the speed loop Comparing, controlling the output PWM to control the motor, the MCU needs to complete the FOC speed control mode algorithm, PID algorithm.
(2) Wireless data interaction. The MCU needs to use a platform such as a Bluetooth link terminal to control the camera and complete the human-computer interaction.
(3) Coordinated control of the PTZ system.
GD32F4XX series MCU, 200Mhz frequency, 3MB Flash 256K Ram, and its own hardware FPU, for the processing of FOC, PID algorithm, the motor control system is very advantageous, with advanced control of motor control, orthogonal coding Device interface, Hall sensor interface, can collect motor speed, position, and current form closed-loop control, programmable PWM mode, can flexibly control three-phase motor to achieve fast response of motor.
2, motor drive
Motor drive: The integrated drive IC or discrete MOS can be used to build the set:
Integrated IC: simple control, higher integration, IC comes with undervoltage protection, short circuit protection, dead zone control, but due to MOS internal integration, poor heat dissipation, drive capability is general.
Discrete drive scheme: low integration, discrete MOS generally has large current, good heat dissipation, good drive capability, MCU generally has dead zone control when outputting PWM, but it is slightly reminded in short circuit, overheat, undervoltage, etc. insufficient
At present, the MPS product line represented by our company has a mature motor driver chip. The chip has dead time and symmetrical performance optimization for various load conditions, and the internal MOSFET is set to 5.5A current limit. When the limit is exceeded, overcurrent The bridge will enter the high impedance state. If the chip temperature exceeds 160 °C, all internal switches will be turned off to prevent overheating damage.
3, the power supply
The handheld PTZ has direct power supply for the lithium battery. It needs a charging management chip, BUCK, BOOST, LDO and many other power ICs. The power branch can be divided into -> 3.3V MCU branch, -> 24 motor drive branch -> other peripheral branches. Not listed here, if necessary, you can directly and ZLG sales staff gaos we will customize a complete power solution for you.
4, wireless transmission
The current mainstream wireless mode of handheld PTZ is BLE. Compared with traditional wire control, wireless is more convenient and fast, and each terminal is equipped with Bluetooth function. Follow-up with the change of PTZ function form requires higher data bandwidth. And farther transmission records, WiFi is a better choice. Currently recommend the two BLE chips that our company represents:
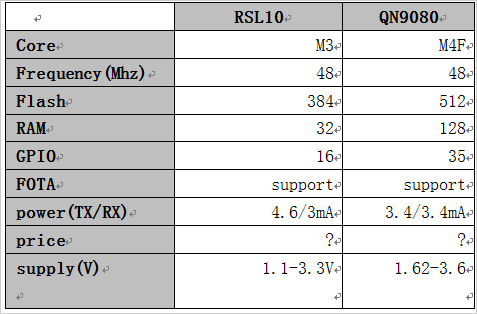
As shown in Table 2. Both ICs are BLE5.0, which consumes less power than BLE4.0/2 and supports FOTA function. For handheld devices, the battery life will be longer. Compared with other Bluetooth SOCs, RSL10 has a wider voltage range. For lithium-ion battery-powered handheld heads, power utilization is higher.
Section Steel Products,Steel Shapes,Structural Steel Shapes,Rectangular Tube Steel
Shandong Rizhaoxin Metal Products Co., Ltd. , https://www.sdrizhaoxinsteel.com